Lamprey2 4 inch Absolute Encoder
- Description
-
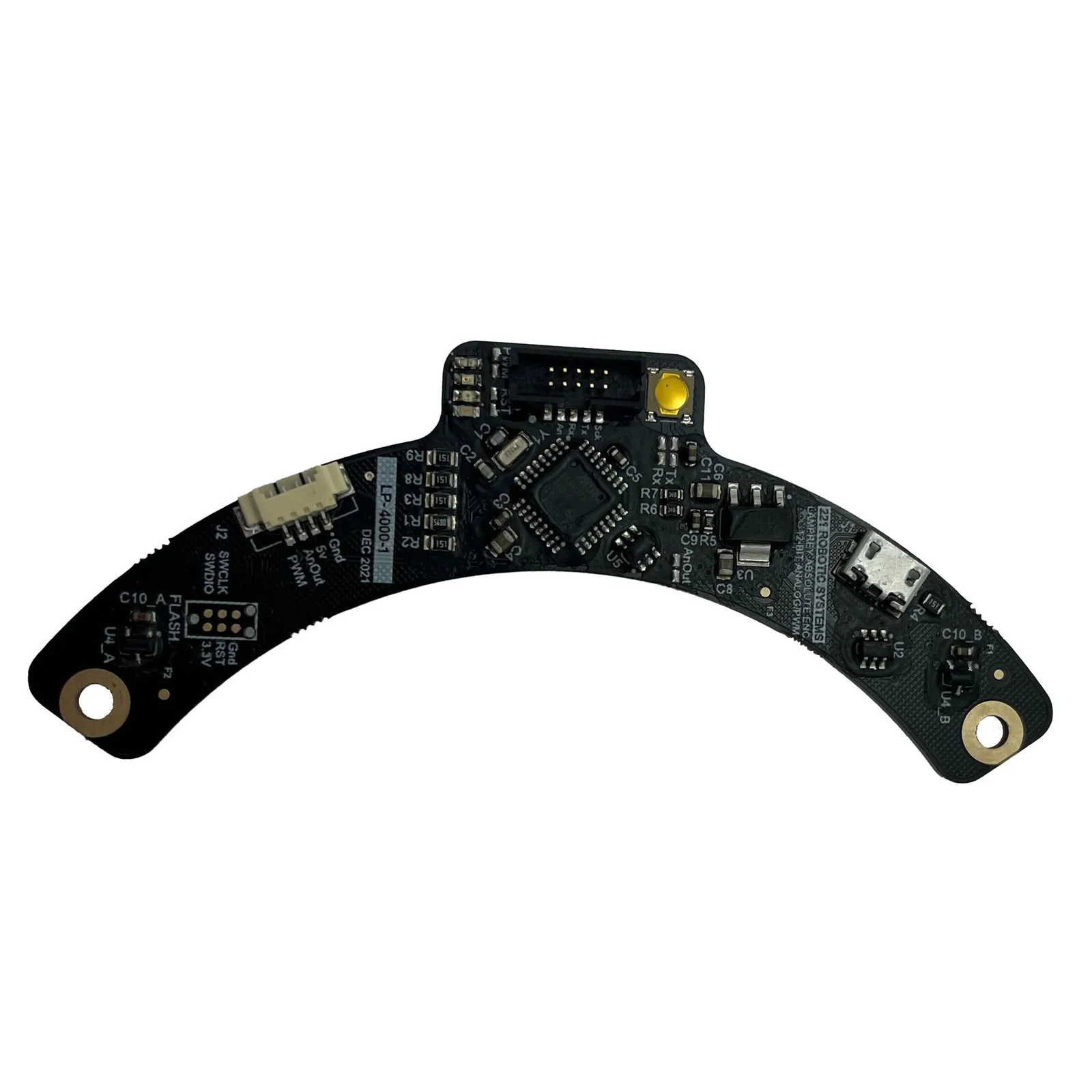
Introducing the Lamprey2 4in. Absolute Encoder. This is the same sensor technology used in our original Lamprey Encoder but with a larger 4 inch hollow bore.
The sensor is a 12-bit absolute encoder. It features a large hollow bore and is great for swerve drive steering, arm joints, or anywhere you need to directly measure your output without being at the shaft end.
It features a custom PCB with the sensor elements and a custom ring magnet to use as a sensor target.
The ring magnet is intended to be universal so the user must design their own interface and/or mounting solution. To install the magnet, glue it to any rotating surface or 3D print a custom hub. The magnet can be sensed from either side of the board.
The magnet must be rotated through 360 degrees during calibration so plan accordingly. If your mechanism cannot do a full rotation the magnet mount should be planned so that it can be rotated independently.
The sensor has USB, 0.100 in. PWM style header, Molex PicoBlade, and a 5x2 ribbon cable header.
The sensor is sold as a set with the PCB and magnet in one kit.
USB commands
The USB stream defaults to floating point absolute position in degrees. You can change the outputs and other sensor features by sending the following commands into the sensor via a Serial terminal.
d - output in degrees (default)
r - output in radians
a - verbose output showing several system variables
p - shows the PWM output (0-4095)
5 - 5v analog output
3 - 3.3v analog output
0 - Set zero point
f - Apply FIR filtering to the output...has 4 steps, sending f cycles through them
j - inverts the signal
J - cancels inversion
Pinout:
The Lamprey2 4in. has 4 interface options, USB, a 4 pin PWM style header, a 4 pin Molex picoblade connector, and a 10-pin IDC cable arranged in a 5x2.
Videos :
- Intro
- Power up and basic calibrate part1
- Power up and basic calibrate part2
- Advanced calibrate
- Internal features
For support please contact 221 Robotic Systems. -
- Connectors: USB, 4 pin 0.1 in. Headers, 5x2 Port, Molex PicoBlade 4 pin
- Output: 12-bit PWM analog output, 3.3 V or 5 V
- Voltage: 5 VDC
- Weight: 0.08 lbs.
Product Information
Product Information
Shipping & Returns
Shipping & Returns
Description
- Description
-
Introducing the Lamprey2 4in. Absolute Encoder. This is the same sensor technology used in our original Lamprey Encoder but with a larger 4 inch hollow bore.
The sensor is a 12-bit absolute encoder. It features a large hollow bore and is great for swerve drive steering, arm joints, or anywhere you need to directly measure your output without being at the shaft end.
It features a custom PCB with the sensor elements and a custom ring magnet to use as a sensor target.
The ring magnet is intended to be universal so the user must design their own interface and/or mounting solution. To install the magnet, glue it to any rotating surface or 3D print a custom hub. The magnet can be sensed from either side of the board.
The magnet must be rotated through 360 degrees during calibration so plan accordingly. If your mechanism cannot do a full rotation the magnet mount should be planned so that it can be rotated independently.
The sensor has USB, 0.100 in. PWM style header, Molex PicoBlade, and a 5x2 ribbon cable header.
The sensor is sold as a set with the PCB and magnet in one kit.
USB commands
The USB stream defaults to floating point absolute position in degrees. You can change the outputs and other sensor features by sending the following commands into the sensor via a Serial terminal.
d - output in degrees (default)
r - output in radians
a - verbose output showing several system variables
p - shows the PWM output (0-4095)
5 - 5v analog output
3 - 3.3v analog output
0 - Set zero point
f - Apply FIR filtering to the output...has 4 steps, sending f cycles through them
j - inverts the signal
J - cancels inversion
Pinout:
The Lamprey2 4in. has 4 interface options, USB, a 4 pin PWM style header, a 4 pin Molex picoblade connector, and a 10-pin IDC cable arranged in a 5x2.
Videos :
- Intro
- Power up and basic calibrate part1
- Power up and basic calibrate part2
- Advanced calibrate
- Internal features
For support please contact 221 Robotic Systems. -
- Connectors: USB, 4 pin 0.1 in. Headers, 5x2 Port, Molex PicoBlade 4 pin
- Output: 12-bit PWM analog output, 3.3 V or 5 V
- Voltage: 5 VDC
- Weight: 0.08 lbs.