navX2-Micro Navigation Sensor
- Description
- Warranty
- What's in the Box?
- Specifications
-
This item is restricted for shipment in some countries. Please check international shipping restrictions before ordering.
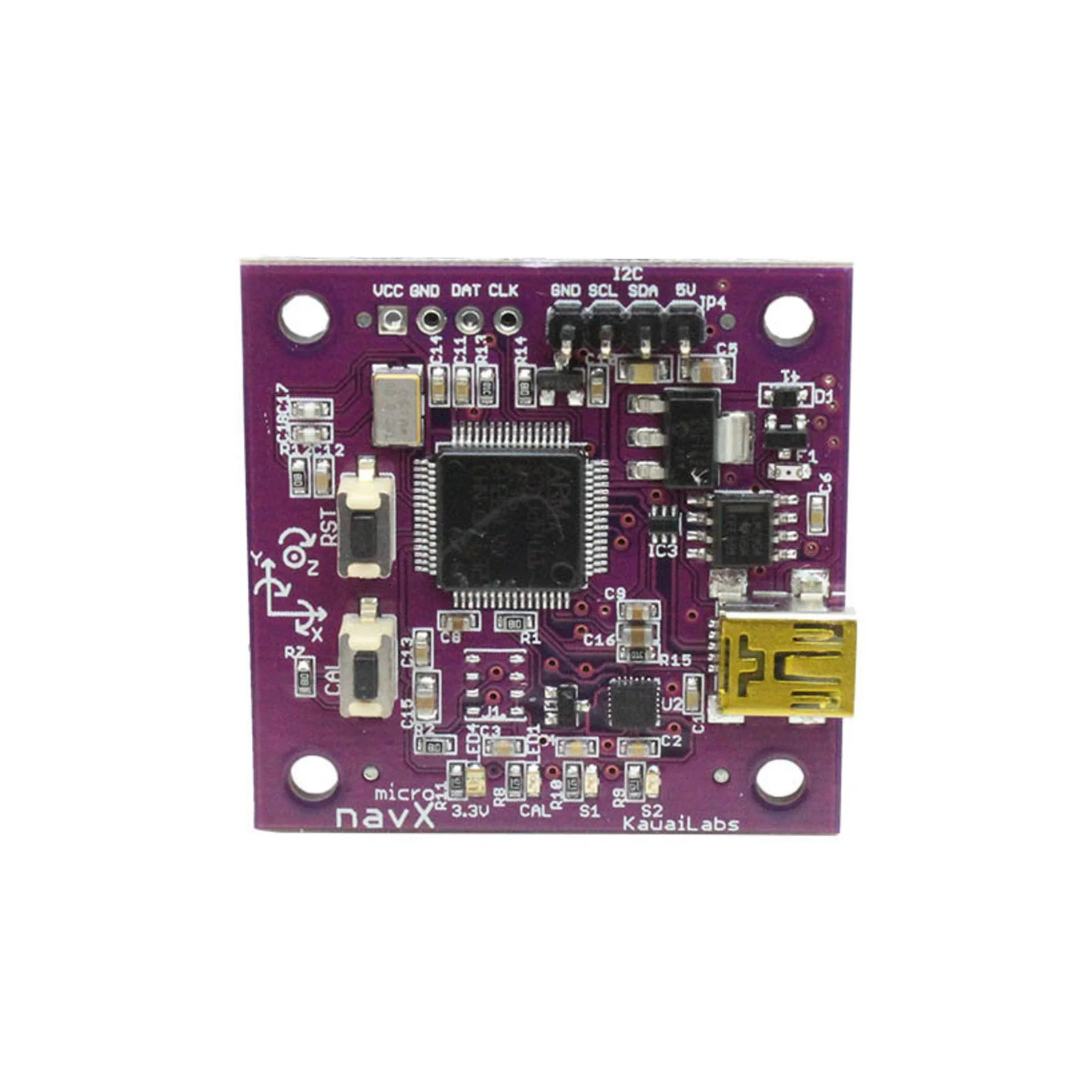
The navX-2 Micro is the greatest sensor for orientation in competitive robots. navX2-Micro is a second-generation 9-axis inertial/magnetic sensor and motion processor. Designed for plug-n-play installation onto robots such as those used in the FIRST Technology Challenge (FTC) and the FIRST Robotics Challenge (FRC), navX2-Micro helps build better robots by adding sophisticated navigation capabilities. Significant improvements over the classic navX-Micro allow for more accuracy, decreased yaw drift, and faster boot time. navX-2 Micro includes software algorithms for enhanced sensor calibration as well as KalmanFilter-based data fusion combining gyro, accelerometer, and magnetometer data into a 9-axis heading and high-quality magnetometer calibration including magnetic disturbance detection.
In addition to being an Inertial Measurement Unit, navX-Micro capabilities are referred to within the aerospace industry as an “Attitude/Heading Reference System” (AHRS). Kauailabs brings this high-tech AHRS capability to FIRST teams – to use, learn, and explore. navX-Micro is a key component of Kauailabs’ ongoing efforts to make state-of-the-art navigation technologies used in drones and autonomous vehicles (e.g., the Google Car) available to robotics students and enthusiasts as low-cost, open-source products.
Improvements over navX "Classic":
navX2-Micro features a new set of IMU & Magnetometer sensors with superior sensor specifications to those on the MPU-9250 sensor. This board has a faster 180Mhz microcontroller and an optimized startup time at 5 seconds versus 15 seconds. In addition, it has a completely new Kalman Filter-based Sensor Fusion algorithm running internally at a blazing fast 416Hz.Features:
- 3-axis Magnetometer,LIS2MDL
- 32-bit ARM processor, ST Micro LSM6DSM IMU
- KalmanFilter-based data fusion
Sophisticated Motion Processing:
- High Accuracy, Low-latency Yaw, Pitch and Roll Angles calculated by real-time Kalman Filter running at 416Mhz
- Factory Accelerometer Calibration, Automatic Gyroscope Calibration
- Quaternions and Gravity-corrected Linear Acceleration and Velocity Measurements
- High-sensitivity Motion Detection
- Tilt-compensated Compass Heading
- 9-Axis absolute heading w/Magnetic disturbance detection
Inertial/Magnetic Measurement Unit:
- Configurable Update Rate from 4 to 200Hz
- Access to Raw Data from Gyroscopes, Accelerometers, and Magnetometers
Easy to Use:
- Plug-n-Play connection on FTC and FRC robots via I2C and USB interfaces
- 5V and 3.3V-compatible I2C Signaling
- Can be powered by either 5V or 3.3VDC
- Connection to Windows PC via USB Cable
- FTC and FRC Software libraries and sample code
- Support for Mounting in horizontal, vertical and even upside-down configurations via Omnimount
- Tools for Magnetometer Calibration
-
Warranty Information
For Studica/Kauai product warranty replacements or assistance with navX products, please contact Studica via email, support_ca@studica.com
-
Sensor Bundle (am-4076a):
-
- Accelerometer Sensitivity: ± 16 g
- ADC Resolution: 16 Bits
- Current: 50 mA
- Gyro Sensitivity: ± 2000° per Second
- Interface: I2C, USB Mini-B
- Magnetometer Angular Accuracy: ± 2°
- Magnetometer Sensitivity: 1.3 Gauss
- Magnetometer Update Rate: 4 Hz
- Pitch/Roll Angular Accuracy: ± 1.5°
- USB/I2C Update Rate: 4 - 200 Hz
- Voltage: 5 VDC
- Yaw Angle Accuracy: ~ 2° per Hour when Still, ~ 1° when Moving
Original: $8.30
-70%$8.30
$2.49Product Information
Product Information
Shipping & Returns
Shipping & Returns
Description
- Description
- Warranty
- What's in the Box?
- Specifications
-
This item is restricted for shipment in some countries. Please check international shipping restrictions before ordering.
The navX-2 Micro is the greatest sensor for orientation in competitive robots. navX2-Micro is a second-generation 9-axis inertial/magnetic sensor and motion processor. Designed for plug-n-play installation onto robots such as those used in the FIRST Technology Challenge (FTC) and the FIRST Robotics Challenge (FRC), navX2-Micro helps build better robots by adding sophisticated navigation capabilities. Significant improvements over the classic navX-Micro allow for more accuracy, decreased yaw drift, and faster boot time. navX-2 Micro includes software algorithms for enhanced sensor calibration as well as KalmanFilter-based data fusion combining gyro, accelerometer, and magnetometer data into a 9-axis heading and high-quality magnetometer calibration including magnetic disturbance detection.
In addition to being an Inertial Measurement Unit, navX-Micro capabilities are referred to within the aerospace industry as an “Attitude/Heading Reference System” (AHRS). Kauailabs brings this high-tech AHRS capability to FIRST teams – to use, learn, and explore. navX-Micro is a key component of Kauailabs’ ongoing efforts to make state-of-the-art navigation technologies used in drones and autonomous vehicles (e.g., the Google Car) available to robotics students and enthusiasts as low-cost, open-source products.
Improvements over navX "Classic":
navX2-Micro features a new set of IMU & Magnetometer sensors with superior sensor specifications to those on the MPU-9250 sensor. This board has a faster 180Mhz microcontroller and an optimized startup time at 5 seconds versus 15 seconds. In addition, it has a completely new Kalman Filter-based Sensor Fusion algorithm running internally at a blazing fast 416Hz.Features:
- 3-axis Magnetometer,LIS2MDL
- 32-bit ARM processor, ST Micro LSM6DSM IMU
- KalmanFilter-based data fusion
Sophisticated Motion Processing:
- High Accuracy, Low-latency Yaw, Pitch and Roll Angles calculated by real-time Kalman Filter running at 416Mhz
- Factory Accelerometer Calibration, Automatic Gyroscope Calibration
- Quaternions and Gravity-corrected Linear Acceleration and Velocity Measurements
- High-sensitivity Motion Detection
- Tilt-compensated Compass Heading
- 9-Axis absolute heading w/Magnetic disturbance detection
Inertial/Magnetic Measurement Unit:
- Configurable Update Rate from 4 to 200Hz
- Access to Raw Data from Gyroscopes, Accelerometers, and Magnetometers
Easy to Use:
- Plug-n-Play connection on FTC and FRC robots via I2C and USB interfaces
- 5V and 3.3V-compatible I2C Signaling
- Can be powered by either 5V or 3.3VDC
- Connection to Windows PC via USB Cable
- FTC and FRC Software libraries and sample code
- Support for Mounting in horizontal, vertical and even upside-down configurations via Omnimount
- Tools for Magnetometer Calibration
-
Warranty Information
For Studica/Kauai product warranty replacements or assistance with navX products, please contact Studica via email, support_ca@studica.com
-
Sensor Bundle (am-4076a):
-
- Accelerometer Sensitivity: ± 16 g
- ADC Resolution: 16 Bits
- Current: 50 mA
- Gyro Sensitivity: ± 2000° per Second
- Interface: I2C, USB Mini-B
- Magnetometer Angular Accuracy: ± 2°
- Magnetometer Sensitivity: 1.3 Gauss
- Magnetometer Update Rate: 4 Hz
- Pitch/Roll Angular Accuracy: ± 1.5°
- USB/I2C Update Rate: 4 - 200 Hz
- Voltage: 5 VDC
- Yaw Angle Accuracy: ~ 2° per Hour when Still, ~ 1° when Moving